





Робототехники двух стран выиграли совместный грант в конкурсе на лучшие проекты фундаментальных научных исследований, проводимом РФФИ и Национальным исследовательским фондом Кореи. Проект попал в число 13 победителей из 84 претендентов.
Учёные Университета Иннополис и корейского университета KAIST разрабатывают роботов с грузоподъёмностью в 2—3 раза выше аналогов

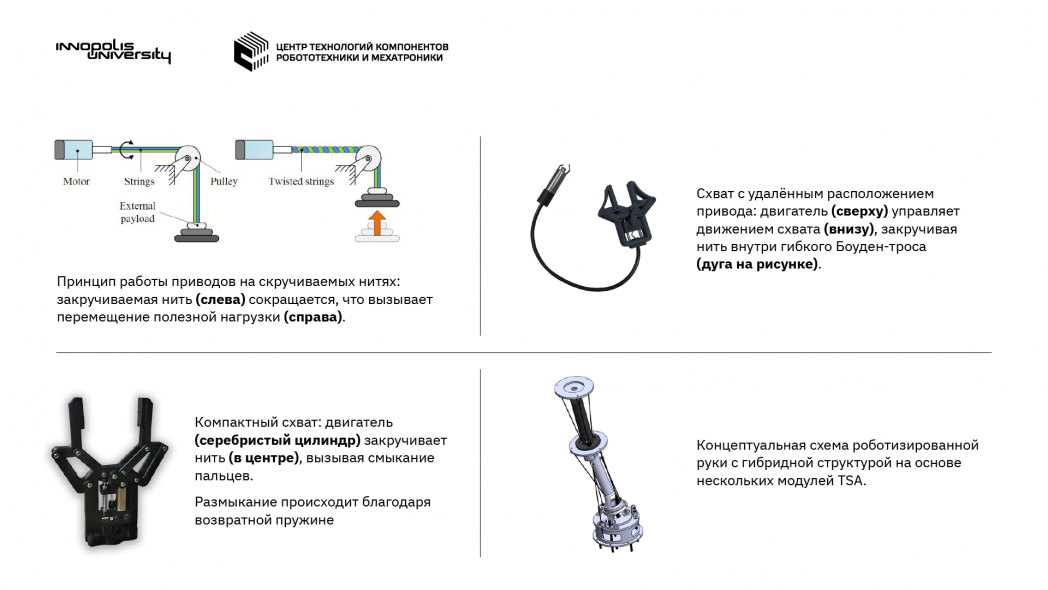
Учёные создадут робототехнические системы и манипуляторы, состоящие из звеньев параллельного типа на основе скрученных нитей — twisted string actuators, TSA. Это позволит повысить полезную нагрузку подобных систем и точность управления ими. В приводах на основе TSA нить с одной стороны закреплена на двигателе, а второй её конец присоединён к рабочему органу или механизму, который перемещает полезную нагрузку. В результате закручивания нити сокращаются и приводят в движение рабочий орган.
«Данный тип приводов имеет ряд уникальных преимуществ, которые делают его привлекательным при разработке и проектировании всевозможных робототехнических систем — легкий вес, высокие развиваемые усилия, точность, гибкость при проектировании и установке», — рассказывает Игорь Гапонов, руководитель Лаборатории мехатроники, управления и прототипирования, входящей в состав Центра компетенций НТИ по направлению «Технологии компонентов робототехники и мехатроники» на базе Университета Иннополис.
Как объясняет специалист российского ИТ-вуза, большинство роботизированных рук с последовательной структурой, использующие традиционные приводы, обладают сравнительно низкой грузоподъёмностью. Приводы в таких устройствах обычно устанавливаются в сочленениях (суставах), и поэтому «плечо» робота вынуждено перемещать на себе остальные 5—6 приводов. В итоге манипулятор весом, например, 500 кг способен поднять не более 50 кг полезной нагрузки. Однако вес таких манипуляторов можно существенно уменьшить с сохранением грузоподъёмности благодаря применению новых приводов и звеньев на базе TSA.
«Мы будем стремиться к тому, чтобы соотношение массы устройства и его грузоподъёмности было не 10-к-1, как мы часто видим в коммерческих роботах, а хотя бы 10-к-2 или 10-к-3 — это уже будет прорывом», — говорит Игорь Гапонов.
Другой популярный класс промышленных манипуляторов, где планируется применять TSA — устройства параллельного типа с большим рабочим диапазоном, также называемые дельта-роботами. У них высокая скорость, но сравнительно низкая грузоподъёмность, из-за чего на подобные манипуляторы нельзя устанавливать многофункциональные роботизированные схваты без серьёзного ухудшения производительности. Однако низкий вес TSA позволяет создавать на их основе более гибкие и лёгкие роботизированные схваты, например, двигатель в данном приводе можно устанавливать удалённо от схвата (на основании робота), и таким образом масса кисти, закрепляемой на робототехнической руке, составит не более 200—300 граммов, в отличие от большинства коммерческих аналогов, вес которых составляет 0,5 кг и более.
Работа над проектом началась в марте и продлится до конца 2021 года. Совместная команда состоит из 13 человек. От Университета Иннополис проектом руководит Игорь Гапонов, от KAIST — профессор Джи-Хван Рю. Российский ИТ-вуз отвечает за разработку математического аппарата и синтез структур на основе TSA. К середине второго года учёные планируют завершить разработку системы управления подобными устройствами и провести эксперименты на синтезированных механизмах. Сотрудники KAIST сосредоточатся на разработке адаптивной системы управления и разработают систему на основе пассивности. Изготовление опытных образцов и эксперименты учёные двух стран проведут совместно.
За 2 года учёные планируют описать теоретические основы моделирования статики и динамики параллельных механизмов и роботов на основе TSA, разработать методы получения информации о внешних воздействиях на робота со стороны окружающей среды без специализированных датчиков силы, классифицировать конструкции подобных роботов и описание их свойств с учётом применения TSA, разработать методы автоматизированного синтеза систем с желаемыми характеристиками, синтез опытных образцов роботов с оптимизированной структурой, разработать математический аппарат для автоматического планирования и оптимизации траектории движения звеньев и роботов, а также разработать адаптивные системы управления отдельными приводами на скрученных нитях и устройствах на их основе.
«Все эти вопросы будут исследованы впервые в мире, что позволит получить ряд новых научных результатов, которые планируется опубликовать в ведущих международных журналах», — отмечает Игорь Гапонов.
По словам сотрудников Университета Иннополис, на основе разработанных и сконструированных модулей получится спроектировать устройства и системы, которым найдут применение практически во всех областях современной техники: промышленные манипуляторы и станки, человеко-машинные интерфейсы, медицинская робототехника, экзоскелеты и др. Отдельные модули на основе TSA можно внедрять в мобильные роботы и любые другие системы, где необходимы линейные приводы.
